NMEA 2000 is a system used on boats for data exchange in a network with a bus structured backbone, but in contrast to earlier methods where each device has its own power and data cables, NMEA 2000 uses a drop cable between the backbone and each device, providing this device with power and in return streaming the data into the backbone making it available for all other devices to use.
NMEA 2000 connects devices using Controller Area Network (CAN) technology originally developed for the auto industry. NMEA 2000 is based on the SAE J1939 high-level protocol, but defines its own messages. NMEA 2000 devices and J1939 devices can be made to co-exist on the same physical network.
NMEA 2000 (IEC 61162-3) can be considered a successor to the NMEA 0183 (IEC 61162-1) serial data bus standard. It has a significantly higher data rate (250k bits/second vs. 4800 bits/second for NMEA 0183). It uses a compact binary message format as opposed to the ASCII serial communications protocol used by NMEA 0183. Another improvement is that NMEA 2000 supports a disciplined multiple-talker, multiple-listener data network whereas NMEA 0183 requires a single-talker, multiple-listener (simplex) serial communications protocol.
Network Construction
The NMEA 2000 network, like the SAE J1939 network on which it is based, is organized around a bus topology, and requires a single 120Ω termination resistor at each end of the bus (The resistors are in parallel. A properly terminated bus should have a total resistance of 60 ohms). The maximum distance for any device from the bus is six metres.
Cabling and Interconnect
The only cabling standard approved by the NMEA for use with NMEA 2000 networks is the DeviceNet cabling standard, which is controlled by the Open DeviceNet Vendors Association. Such cabling systems are permitted to be labeled "NMEA 2000 Approved". The DeviceNet standard defines levels of shielding, conductor size, weather resistance, and flexibility which are not necessarily met by other cabling solutions marketed as "NMEA 2000" compatible.
There are two sizes of cabling defined by the DeviceNet/NMEA 2000 standard. The larger of the two sizes is unfortunately denoted as "Mini" (or alternatively, "Thick") cable, and is rated to carry up to 8 Amperes of power supply current. The smaller of the two sizes is denoted as "Micro" (or alternatively, "Thin") cable, and is rated to carry up to 3 Amperes of power supply current.
Mini cable is primarily used as a "backbone" (or "trunk") for networks of larger vessels (typically with lengths of 20 m and above), with Micro cable used for connections between the network backbone and the individual components. Networks on smaller vessels often are constructed entirely of Micro cable and connectors.
An NMEA 2000 network is not electrically compatible with an NMEA 0183 network, and so an interface device is required to send messages between devices on the different types of network. Examples include the Maretron USB-100, Simrad AT10 and Actisense's NGW-1. These devices vary in which messages they will translate between the two networks. An adapter such as the Actisense NGT-1-USB, Airmar U200 or Maretron USB100 is also required if NMEA 2000 messages are to be received by or transmitted from a PC.
Message Format and PGNs
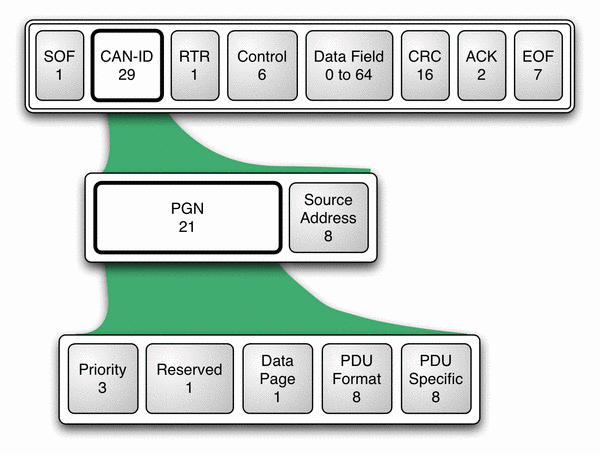
In accordance with the SAE J1939 protocol, NMEA 2000 messages are sent as packets that consist of a header followed by (typically) 8 bytes of data. The header for a message specifies the transmitting device, the device to which the message was sent (which may be all devices), the message priority, and the PGN. The PGN indicates which message is being sent, and thus how the data bytes should be interpreted to determine the values of the data fields that the message contains. The NMEA sells the standard that describes how to decode each message given its PGN, and so this information is not publicly available. However, enthusiasts are slowly making progress in discovering these PGN definitions.
NMEA 2000 connects devices using Controller Area Network (CAN) technology originally developed for the auto industry. NMEA 2000 is based on the SAE J1939 high-level protocol, but defines its own messages. NMEA 2000 devices and J1939 devices can be made to co-exist on the same physical network.
NMEA 2000 (IEC 61162-3) can be considered a successor to the NMEA 0183 (IEC 61162-1) serial data bus standard. It has a significantly higher data rate (250k bits/second vs. 4800 bits/second for NMEA 0183). It uses a compact binary message format as opposed to the ASCII serial communications protocol used by NMEA 0183. Another improvement is that NMEA 2000 supports a disciplined multiple-talker, multiple-listener data network whereas NMEA 0183 requires a single-talker, multiple-listener (simplex) serial communications protocol.
Network Construction
The NMEA 2000 network, like the SAE J1939 network on which it is based, is organized around a bus topology, and requires a single 120Ω termination resistor at each end of the bus (The resistors are in parallel. A properly terminated bus should have a total resistance of 60 ohms). The maximum distance for any device from the bus is six metres.
Cabling and Interconnect
The only cabling standard approved by the NMEA for use with NMEA 2000 networks is the DeviceNet cabling standard, which is controlled by the Open DeviceNet Vendors Association. Such cabling systems are permitted to be labeled "NMEA 2000 Approved". The DeviceNet standard defines levels of shielding, conductor size, weather resistance, and flexibility which are not necessarily met by other cabling solutions marketed as "NMEA 2000" compatible.
There are two sizes of cabling defined by the DeviceNet/NMEA 2000 standard. The larger of the two sizes is unfortunately denoted as "Mini" (or alternatively, "Thick") cable, and is rated to carry up to 8 Amperes of power supply current. The smaller of the two sizes is denoted as "Micro" (or alternatively, "Thin") cable, and is rated to carry up to 3 Amperes of power supply current.
Mini cable is primarily used as a "backbone" (or "trunk") for networks of larger vessels (typically with lengths of 20 m and above), with Micro cable used for connections between the network backbone and the individual components. Networks on smaller vessels often are constructed entirely of Micro cable and connectors.
An NMEA 2000 network is not electrically compatible with an NMEA 0183 network, and so an interface device is required to send messages between devices on the different types of network. Examples include the Maretron USB-100, Simrad AT10 and Actisense's NGW-1. These devices vary in which messages they will translate between the two networks. An adapter such as the Actisense NGT-1-USB, Airmar U200 or Maretron USB100 is also required if NMEA 2000 messages are to be received by or transmitted from a PC.
Message Format and PGNs
In accordance with the SAE J1939 protocol, NMEA 2000 messages are sent as packets that consist of a header followed by (typically) 8 bytes of data. The header for a message specifies the transmitting device, the device to which the message was sent (which may be all devices), the message priority, and the PGN. The PGN indicates which message is being sent, and thus how the data bytes should be interpreted to determine the values of the data fields that the message contains. The NMEA sells the standard that describes how to decode each message given its PGN, and so this information is not publicly available. However, enthusiasts are slowly making progress in discovering these PGN definitions.

 RSS Feed
RSS Feed
