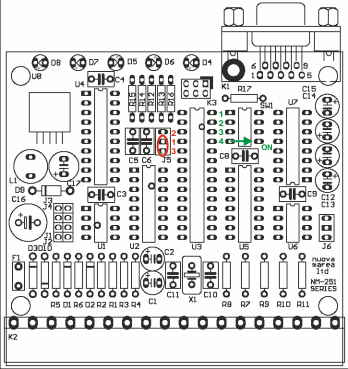
The NM-251A can be configured to input AIS signal (38.400/8/N/1) and output to 5x NMEA Ports and RS232 in two different ways
1. As Shown in the green markings: Switch the dip switch 4 to the ON position (sw1, sw2, sw3 to OFF). Input and output Baud to 5x ports and the RS232 will be set to 38.400/8/N/1
The input signal is proccesed from the microcontroller.
2. As shown in the red markings: Move jumper from the 1-2 position (default) to 1-3 position. Output Baud rate to the 5x ports and the RS232 will follow the input baud rate.
The input signal is not proccesed from the microcontroller
In both cases the primary/secondary function should work normaly as described in the manual
1. As Shown in the green markings: Switch the dip switch 4 to the ON position (sw1, sw2, sw3 to OFF). Input and output Baud to 5x ports and the RS232 will be set to 38.400/8/N/1
The input signal is proccesed from the microcontroller.
2. As shown in the red markings: Move jumper from the 1-2 position (default) to 1-3 position. Output Baud rate to the 5x ports and the RS232 will follow the input baud rate.
The input signal is not proccesed from the microcontroller
In both cases the primary/secondary function should work normaly as described in the manual

 RSS Feed
RSS Feed
